Oct
The various difficulties caused by COVID-9 have made people's attention to robots, especially collaborative robots, unprecedentedly high. The concept of "robot substitution" has once again set off an upsurge, and the shipment of collaborative robots has repeatedly reached new highs.
"Industrial robot out of the cage"
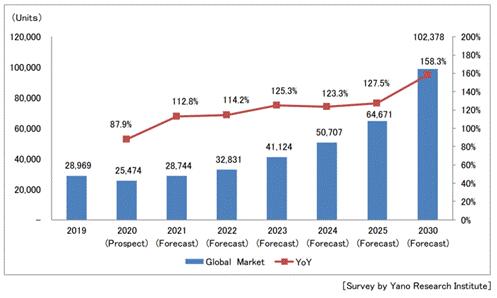
Many well-known market research institutions believe that collaborative robots have injected fresh blood into the entire robotics industry and will lead the entire robotics industry in the next decade. According to Japan’s Yano Research Institute’s market report, global shipments of collaborative robots are expected to reach 28,700 units in 2021, and by 2030, this number is expected to exceed the 100,000-unit mark.
Global shipment trends of collaborative robots
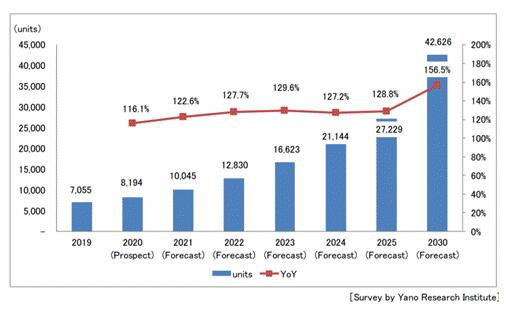
The prospect of collaborative robots in the Chinese market is also very impressive. Even in the context of the global decline in sales of collaborative robots in 2020, the domestic market will continue to grow, with shipments accounting for approximately 32.2% of the global market, becoming a collaborative robot on a global scale. The fastest growing market.
China's collaborative robot shipment trend
Collaborative robots need more safety assessment and safety protection
Some users believe that collaborative robots are "safe". After using collaborative robots, safety assessments and corresponding protective measures are no longer required. This is actually an incorrect perception. In the final analysis, collaborative robots still belong to the category of machines, and different applications have different risks. Before the collaborative robot is completely released from the "cage", it must be ensured that its application is sufficiently safe, otherwise it may lead to serious consequences.
This time we will talk about the risks that need to be considered before designing from the perspective of collaborative robot system design.
The dangerous "three sins" of collaborative robots
In GB 11291.2-2013 "Safety Requirements of Industrial Robots Part 2: Robot Systems and Integration" (ie EN 10218-2) and GB/T 36008-2018 "Robots and Robot Equipment Collaborative Robots" (ie ISO/TS 15066) It is stipulated that for collaborative robot systems, the entire collaborative task and workspace should be considered for risk assessment.
The dangers of collaborative robots should include at least three aspects:
1. Related dangers of the robot itself:
a. The characteristics of the robot (such as load, speed, force, power, surface shape, etc.)
b. Conditions for quasi-static contact of the robot
c. When the operator is standing close to the robot arm (such as preventing working under the robot)
1. Related dangers of the robot system:
a. The dangers of end effectors and workpieces, including lack of ergonomic design, sharp edges, missing workpieces, protrusions, etc.
b. The relationship between the position of the operator and the path relative to the position of the part, the orientation of the structure, and the dangerous position on the fixture
c. Fixture design, splint layout and operation, and other related hazards
d. Determine whether the contact is transient or quasi-static, and which parts of the operator's body may be affected
e. The design and layout of any manual control robot guiding device (such as accessibility, ergonomics, potential misuse, etc.)
f. The impact of peripheral equipment or the environment (such as the removal of the protective cover of the neighboring machine, the proximity of the laser cutting object, etc.)
1. Application related hazards:
a. Specific hazards in the process (such as temperature, bursting of parts, etc.)
b. Restrictions caused by the use of personal protective equipment
c. Insufficiency of ergonomic design (such as loss of attention, unreasonable operation, etc.)
When identifying hazards, all tasks and hazards that are foreseeable within a reasonable range should be identified together, and then corresponding risk reduction measures should be taken. For traditional industrial robot systems, risk reduction is usually achieved by separating the operator and the robot system with protective devices. The collaborative operation is different. The risk reduction is mainly achieved through the design and application of the robot system and the collaborative space.
There is no absolutely safe robot, only safe robot applications
There are many advantages of collaborative robots, but if the dangers of the collaborative robot system are not fully identified before the design, it is equivalent to naked exposure of the operator to the danger. Once an accident occurs, the consequences are unimaginable. The risk assessment is designed by the collaborative robot system. Base.
Pilz has accumulated rich experience in the safety application of collaborative robots, and can provide "turnkey" engineering services for collaborative robots' risk assessment, system design and system integration, safety verification and training.

Mon - Fri 8:00AM - 6:00PM Central Time